作者|黄楠
编辑|袁斯来
2025年,在一场机器人比赛中,把整理桌布、关闭保鲜盒作为任务,似乎有些太过儿戏。
然而,这些人类随手完成的动作,对机器人至今是难题。
5月下旬,美国亚特兰大ICRA WBCD 2025现场,一台星海图双臂机器人正缓慢地将网球挪放至包装纸箱内,半人形结构的ARX机器人反反复复开合保鲜盒卡扣,还有松灵机器人在模拟科学实验桌上进行着操安装硅胶柱、操作透明试管等操作。
这些展示和人类梦想中的“具身智能”相差很远,可以说有些简陋。
一个多月前,北京亦庄人形机器人马拉松赛上,多台参赛设备接连摔倒的画面,以一种戏剧性的方式暴露出智能化表象下的技术短板。
这一场景多少戳破了市场长期以来的非理性期待。资本狂热涌入后,部分具身智能企业没有落地能力、缺乏实际应用支撑,估值却短时间暴涨,这种不平衡之下显然危机潜伏。
但也要看到,具身智能厂商方面正加速收敛各自路径。
目前业界对具身智能机器人的应用已形成普遍共识,工业制造、物流仓储、生物医疗、商业服务等被视为核心场景。
这些场景中,工业制造领域机器人相对普及。以美国市场为例,作为交通物流枢纽之一,亚特兰大有众多仓储物流企业在此设仓,需雇佣大量本地工人完成作业,但人力成本高昂。根据Indeed、Glassdoor等网站数据估算,仓库工人时薪在20 - 32美元不等;按平均时薪25美元、一年工作2000小时估算,年薪达5万美金。
所以很多物流仓库等已实现高度自动化,其中代表性的有亚马逊Kiva构建的 “货到人” 仓储网络。
机器人还远未到代替人类的程度,但它们已经可以承担部分重担。
“即便只是某一细微环节问题的突破,机器人设备在规模化作业放大效应下,从非结构化环境中精度与灵活性的提高,对整个系统的效率带来显著提升。这种面向实际需求、具备商业价值的环节突破,正推动机器人从‘指令执行’向‘智能自主’的跨越。”WBCD(What Bimanual Can Do、探索双臂机器人能力边界挑战赛)发起人、DeepMind机器人团队许倬告诉硬氪。
三大核心场景问题
对比其他领域,厂房车间、物流仓储等作为典型的工业场景,结构化明显,工作环境更稳定。加上过去重型机械臂、协作机器人、物流无人车、AGV等设备积累了大量真实场景数据,能直接复用到具身机器人的训练中。
但进入物流封装环节,自动化技术还未能实现对其有效覆盖与解决。
今天,全球有不少仓储中心仍依赖大量人工操作来完成,工人们需要根据商品的形状、尺寸和特性,灵活调整装箱方式并完成精准封装。这也映射出现有的机器人技术在柔性操作和环境适应上的根本性挑战。
星海图联合创始人虞磊告诉硬氪,看似应高度自动化的封装环节还离不开人工,一是商品形态多样,不同品类的商品在尺寸、重量、形状上差异显著,需要动态调整装箱策略;二是封装工艺复杂,需确保商品合理摆放且箱体封闭牢固,涉及多指协同、力控感知等精细动作;三是单臂操作有局限,难以完成 “一手固定箱体、一手封装”的协同任务,传统双臂方案则受算法限制,灵活性也不足。

ICRA WBCD 2025现场(图源/企业)
而生物医疗领域要实现自动化技术的难度更大。
比如在制药领域的实验场景中,试管操作、移液器使用等重复性基础工作耗费人力,还面临操作一致性与精度的挑战,催生了一个规模可观的实验外包行业。
合碳科技创始人、前药明康德CIO陈志刚指出,仅 “纯化” 环节、即从合成反应混合物中分离目标产物,就要耗费大量人力,“虽市面有自动过柱机完成部分步骤,但全流程自动化仍有细节难点,如对准、连接、稳压等动作需高精度协调控制。”
以药明康德为例,作为一家市值超2000亿人民币的头部医药企业,就承接了欧美实验室的部分研究任务,并在中国及亚洲其他劳动力相对低廉的地区组建团队,处理重复性较高、技术门槛较低的实验环节。
但即便有相对廉价的人工,企业仍希望能引入机器人提效。“由于许多生物实验流程复杂,并且现有机器人末端执行器自由度有限,智能化和灵巧操作能力受限,因此在操作生物样品时,很难模仿人手所展现出的高柔韧性和灵巧性。”Robotics and AI Institute(RAI)研究员孙凌峰告诉硬氪。
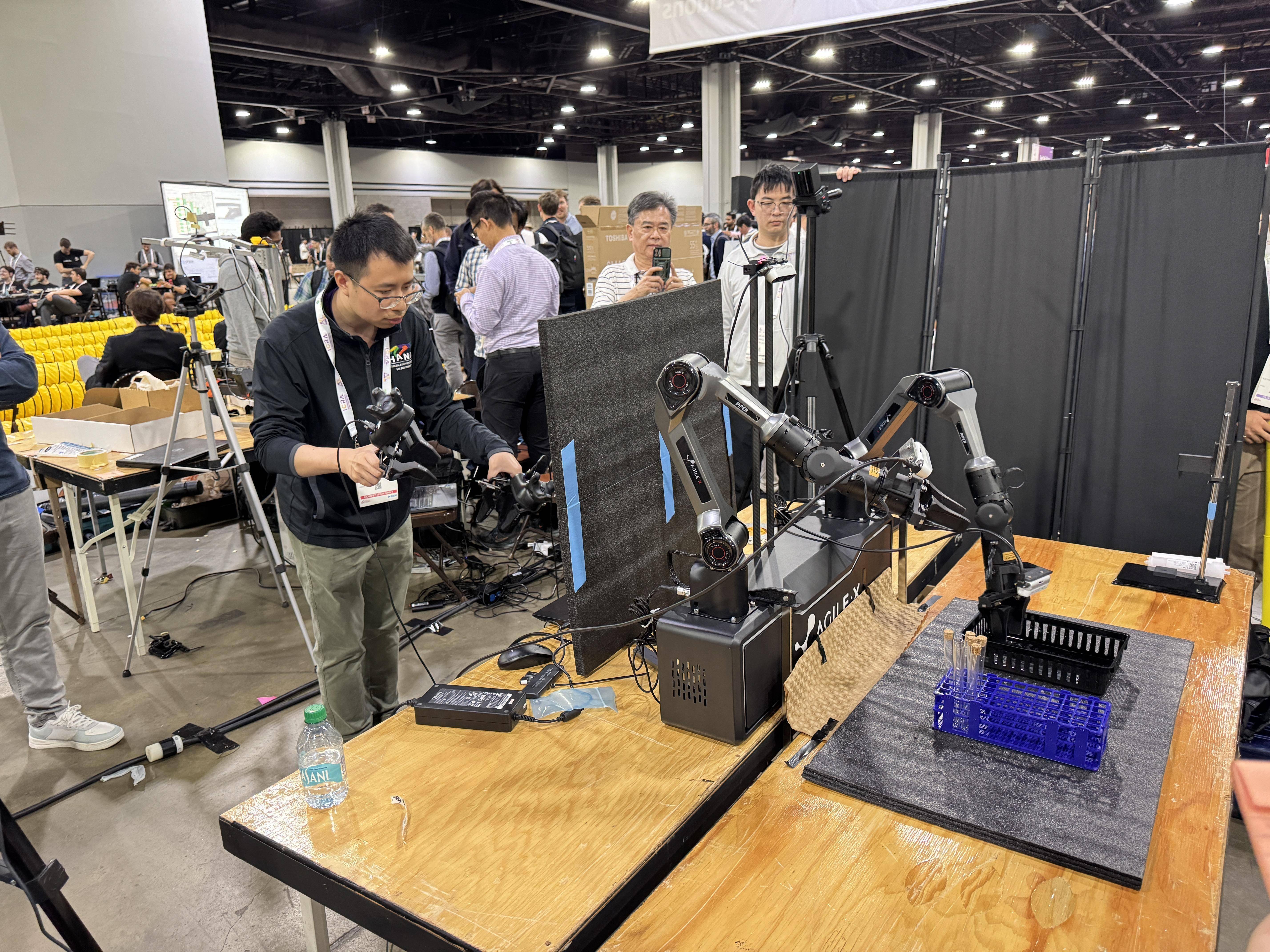
WBCD生命科学实验挑战中的松灵机器人(图源/企业)
松灵机器人北美负责人曾逸恒也向硬氪表示,生物医疗场景的实现难度更大,一方面医疗器械普遍价格较高,需要在有限预算约束下实现最优作业效果;其次试管识别、力度控制等精细动作也很难实现。
“完成任务的方法可以多种多样,但在具体执行中,如何保障数据质量、系统稳定性和实验完成质量,是必须面对的挑战。”曾逸恒说。
第三类场景,也是所有具身机器人厂商的终极目标,即面向C端消费者,让机器人真正融入千家万户。
目前有部分任务已具备先行落地的条件。以家庭厨房及部分商业餐饮机构为例,其中的食材处理、餐具清洁等操作流程高度标准化、模式化,恰好为机器人替代人工提供了理想的应用场景。
不过这类场景也只有少数公司在试水。仅铺桌布、食品封装保鲜盒等看似简单的日常操作,其动作复杂、操作流程长,且缺乏相关训练数据集和demo,无法提供有效的可参考路径。ARX(方舟无限)机器人CEO张鑫亮认为,这类柔性物体及双臂协同对力反馈敏感的任务,未来一两年内都是业界需共同努力的方向。
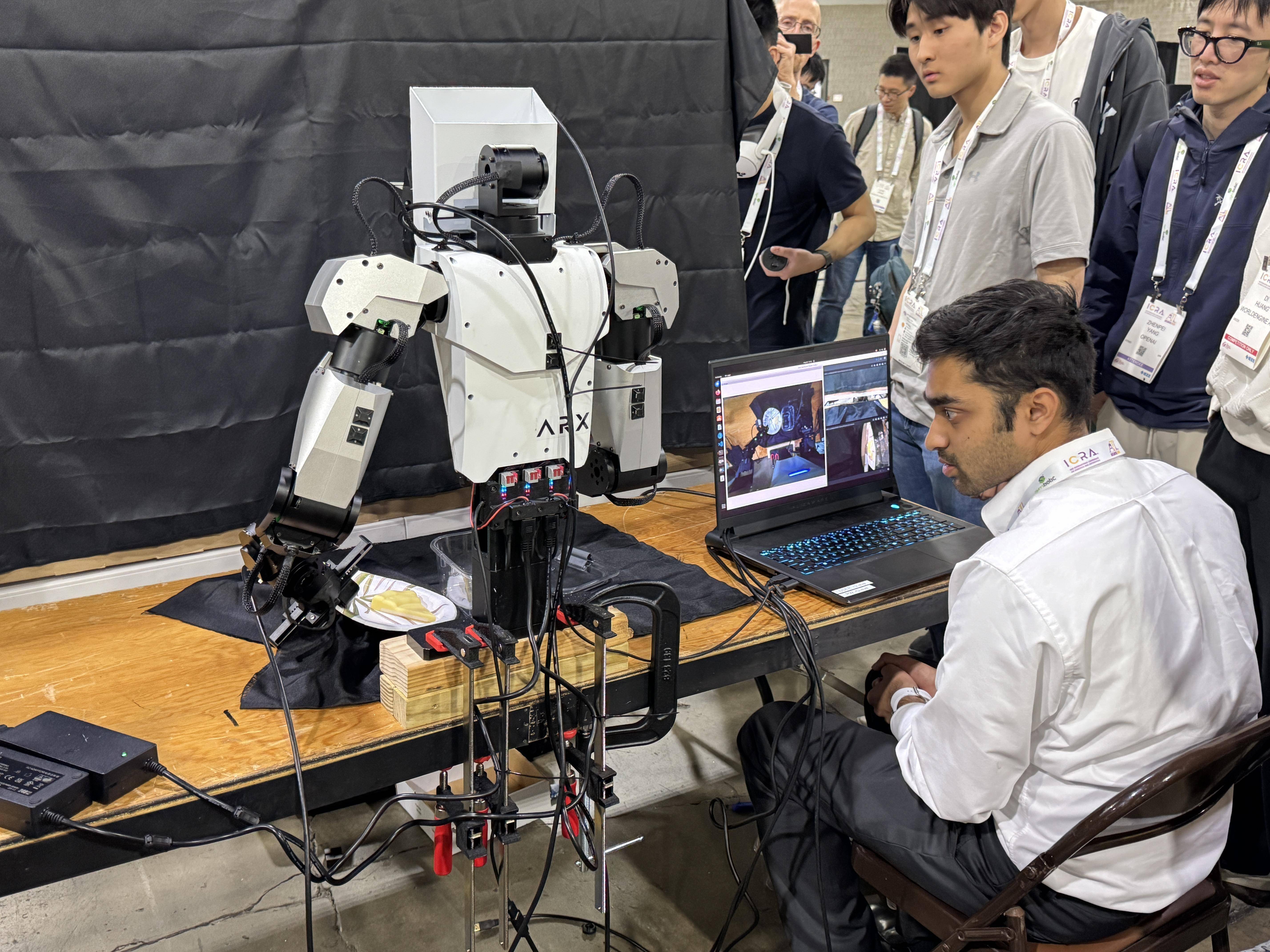
WBCD用于餐桌整理场景的ARX机器人(图源/企业)
具身智能面临的问题虽然源于不同行业、不同场景,但本质上都归为一点:现实的复杂远超目前软硬件的解决能力。无论是机械本身还是自动化系统,还需要很长时间突破瓶颈。
多种方案待验证
从WBCD现场数十家企业与科研机构的演示来看,大体上可将具身智能方案分为三类。
第一类是遥操作,包括远程遥操和新型遥操作系统加执行器硬件两种。
二者都是通过交互设备或通信链路实时控制机器人,优势在于操作更果断灵巧,可以解决机器人在复杂、非结构化环境中自主能力不足的问题。比如具身智能方案商艾欧智能,其将控制端部署在深圳总部,由技术人员远程操作美国会场的机器人;FrodoBot公司的解决方案可实现从纽约到亚特兰大的远程操作。
硬氪了解到,这种 “远程操作” 模式不仅适用于数据采集场景,还可以通过跨地域人力调度实现成本优化。一个直观案例是,通过由东南亚地区的操作者远程管理欧美仓库的机器人,可实现劳动力成本降低至本地水平的三分之一至十分之一不等。

WBCD物流打包场景中使用的星海图机器臂(图源/企业)
第二类是目前市场热度较高的灵巧手方案,通过机械结构对人类手部的模拟仿真,融合感知和运动控制系统,确保机器人能完成精细的操作任务。
苏黎世联邦理工学院团队在WBCD上演示了其开发的ORCA机械手,这是一款低成本、开源、高度拟人化的机器人手,17个自由度、手腕具备60度弯曲能力,能直接使用人类的各种工具,完成旋转物体、堆叠积木等任务,还支持强化学习与模仿学习。
第三类是自动模型,即通过给机器人 “投喂” 海量操作数据训练,让机器人自主决策,最终可以独立完成任务,无需人工实时干预。
但目前模型的发展仍面临关键瓶颈,其泛化能力和对真实世界动态变化的适应性显著不足,这本质上源于训练数据的"三重困境":真实场景数据虽质量优异但采集成本高昂;互联网开源数据规模庞大却噪声干扰严重;合成仿真数据虽可控性强但存在落地鸿沟。
这也直接制约了模型在开放环境中的实际表现,成为亟待突破的重点方向。比如同样采用VLA(Vision-Language-Action)框架的耐基梅隆大学、跨维智能和佐治亚理工等团队,其方案在复杂指令解析能力、动态场景理解深度等技术路径上有明显差异表现。
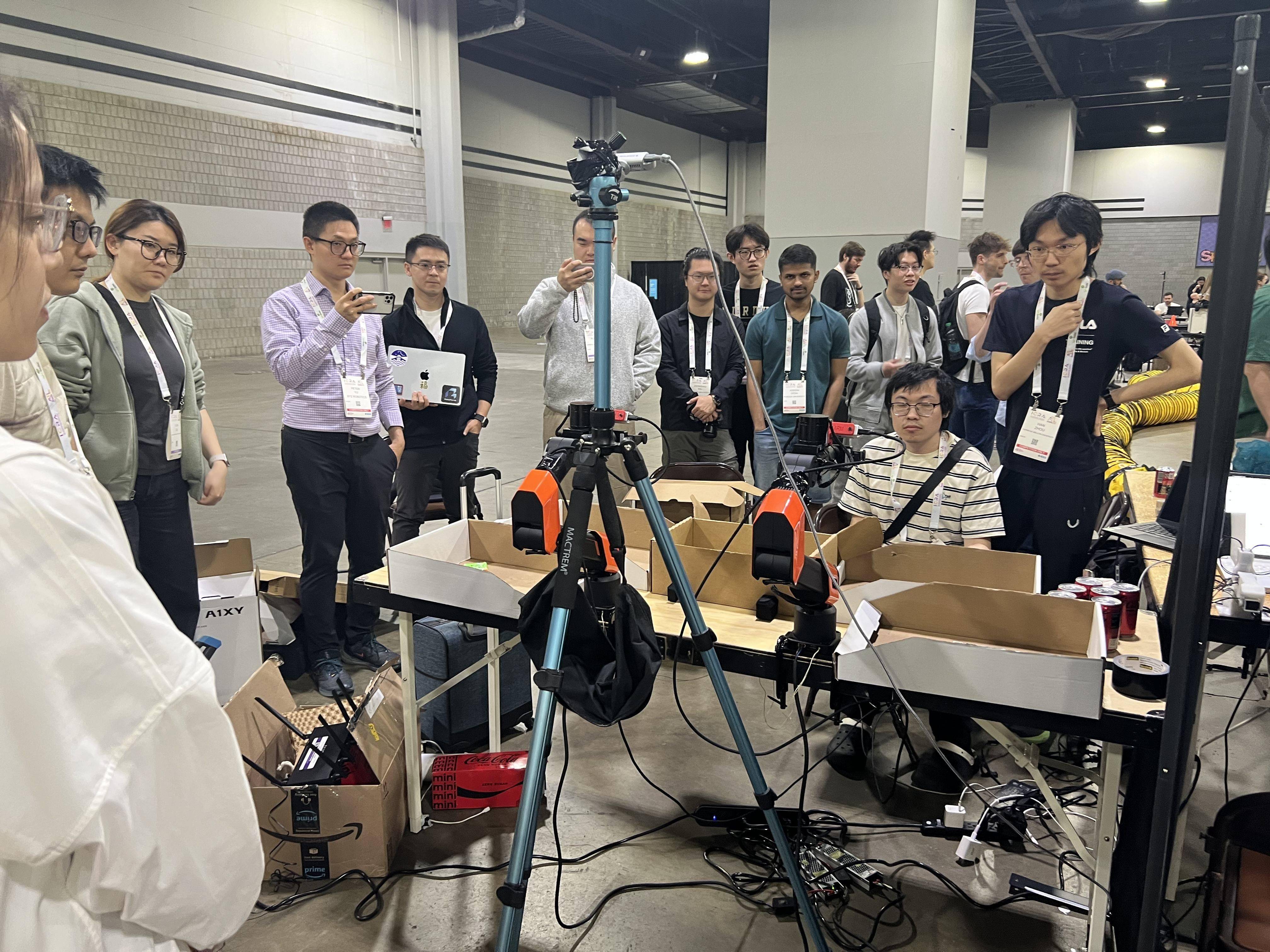
ICRA WBCD 2025现场(图源/企业)
短期来看,"人机协作"仍是主流范式,这也意味着机器人首先要在特定场景、单点任务中,接近人类作业水平,并各种维度上建立优势。长期而言,随着数据飞轮、仿真训练、强化学习等技术成熟和突破,自主智能才是终极目标。
在这个进程中,人机共存的过渡形态不仅是合理的存在,更是产业迭代的必经阶段。
商业世界远比实验室来得真实与复杂。身处浪潮中的企业,首要任务不再仅取决于技术先进性,而是如何精准把握“技术成熟度”与“市场需求”之间的微妙平衡。尤其是加快垂直场景的商业化验证,才是在激烈的市场竞争中生存的关键。
免责声明:本网信息来自于互联网,目的在于传递更多信息,并不代表本网赞同其观点。其内容真实性、完整性不作任何保证或承诺。由用户投稿,经过编辑审核收录,不代表头部财经观点和立场。
证券投资市场有风险,投资需谨慎!请勿添加文章的手机号码、公众号等信息,谨防上当受骗!如若本网有任何内容侵犯您的权益,请及时联系我们。
相关文章
-
06月03日零售资讯
2025-06-031阅读
-
首款星闪/鸿蒙AI智能手表!华为WATCH 5系列官宣:与Pura 80同台发布
2025-06-031阅读
-
英伟达 PC 应用新增浅色模式,11.0.4 版本更新支持 12 款游戏
2025-06-031阅读
-
联想来酷旗下品牌“斗战者”首款游戏本战 7000 锐龙版亮相
2025-06-031阅读
-
雷军:小米YU7不是一辆普通的、平庸的SUV
2025-06-031阅读
-
华为F5G-A万兆全光园区方案无敌手 中国市场连续六年第一
2025-06-031阅读
-
香蕉派推出 BRI-R4 Pro 单板机,配备五个网口
2025-06-031阅读
-
治理“套娃”收费立竿见影 全国有线电视用户稳定2亿户以上
2025-06-031阅读
-
赛睿推出寒冰新星 Arctis Nova 3 无线耳机,109.99 美元
2025-06-031阅读
-
OPPO 产品总监称华为 Pura 80 相机模组“非常非常贵”
2025-06-031阅读

